





















Comment créer un robot suiveur de ligne à l'aide d'Arduino - Connexion et code
- 26 Feb, 2024
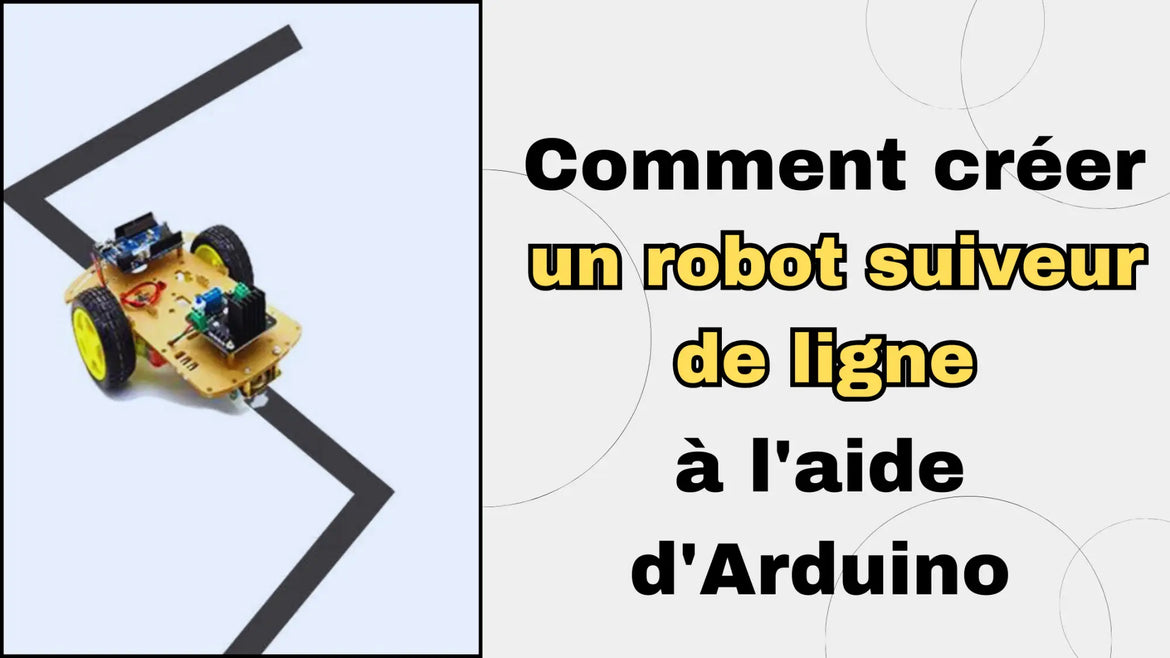
Comme son nom l’indique, le robot suiveur de ligne est un véhicule automatisé qui suit une ligne visuelle intégrée à la surface.

Résultat final
Après avoir téléchargé le code, si votre bot ne fonctionne pas dans le bon sens, modifiez le câblage des moteurs BO. Calibrez également les deux capteurs IR en faisant varier leurs potentiomètres.
Le GIF ci-dessous montre le fonctionnement du robot suiveur de ligne . Ici, nous avons tracé le chemin sur une surface de couleur blanche avec du ruban adhésif de couleur noire.
Comme son nom l’indique, le robot suiveur de ligne est un véhicule automatisé qui suit une ligne visuelle intégrée à la surface. Cette ligne visuelle est un chemin sur lequel évolue le robot suiveur de ligne. Généralement, il utilise une ligne noire sur une surface blanche, ou vous pouvez l'ajuster comme une ligne blanche sur une surface noire.
Habituellement, les débutants et les étudiants obtiennent leur première expérience robotique avec ce type de robot. Nous avons appris comment créer un robot suiveur de ligne avec Arduino dans cet article basé sur un projet.
Les robots suiveurs de ligne sont utilisés pour assister le processus de production automatisé. Ils sont également utilisés dans des applications militaires, à des fins d’assistance humaine, de services de livraison, etc.
Fonctionnement du robot suiveur de ligne
Le concept du robot suiveur de ligne est lié à la lumière. Ici, nous utilisons le comportement de la lumière sur la surface en noir et blanc. La couleur blanche reflète toute la lumière qui tombe dessus, tandis que la couleur noire absorbe la lumière.
Dans ce robot suiveur de ligne, nous utilisons des émetteurs et des récepteurs IR (photodiodes) . Ils servent à envoyer et recevoir les lumières. Lorsque les rayons IR tombent sur une surface blanche, ils sont réfléchis vers le récepteur IR, générant des changements de tension.
Les surfaces noires absorbent le rayonnement infrarouge et ne réfléchissent aucun des rayons qui les frappent ; par conséquent, aucun photon n’atteint le récepteur infrarouge.
Dans ce projet, lorsque le capteur IR détecte une surface blanche, un Arduino obtient 1 (élevé) en entrée, et lorsqu'il détecte une ligne noire, un Arduino obtient 0 (faible) en entrée. Sur la base de ces entrées, un Arduino Uno fournit la sortie appropriée pour contrôler le robot.
Composants utilisés dans le robot suiveur de ligne
- Arduino Uno
- Capteur infrarouge
- Pilote de moteur L293D
- Moteur BO
- roues
- Batterie aux ions lithium
- Câbles de démarrage
En outre, le châssis du robot doit y monter tous les composants ci-dessus. Un châssis de robot est un composant optionnel ; vous pouvez également réaliser le châssis du robot en carton.
Arduino Uno
Arduino Uno est un microcontrôleur ATmega328P 8 bits . Pour prendre en charge le microcontrôleur, il utilise des composants tels qu'un oscillateur à cristal, une communication série, un régulateur de tension, etc. Il dispose de 14 broches d'E/S numériques ( 6 broches peuvent être utilisées comme broches PWM). Il dispose de six broches d'entrée analogiques distinctes, d'une connexion USB, d'une prise d'alimentation, d'un en-tête ICSP et d'un bouton de réinitialisation.

Cette carte est programmable avec la plateforme Arduino IDE (Integrated Development Environment) via un câble USB de type B. Cette carte peut être alimentée via un câble USB ou une tension externe allant de 7 à 20 volts. Pour en savoir plus sur un Arduino Uno, référez-vous à l'article, qu'est-ce que l'Arduino Uno ?
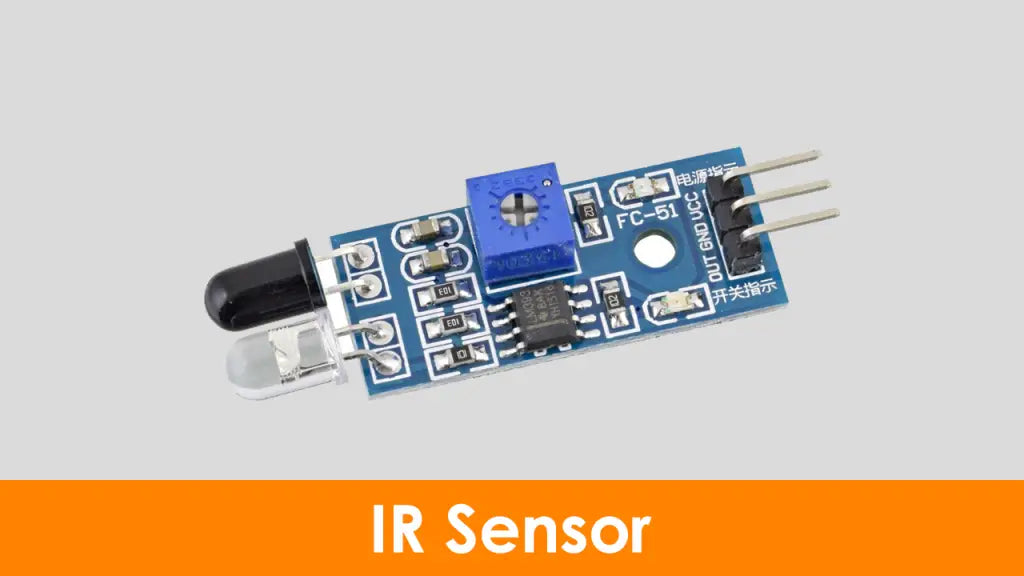
Capteur infrarouge
Un capteur infrarouge émet de la lumière pour détecter certains environnements. Dans le spectre infrarouge, tous les objets émettent une forme de rayonnement thermique invisible à nos yeux, mais un capteur infrarouge peut détecter ces rayonnements.
Ici, la LED IR est un émetteur et la photodiode IR est un détecteur. Une LED IR émet la lumière IR et la photodiode est sensible à cette lumière IR. Lorsque la lumière IR tombe sur la photodiode, les tensions de sortie et les résistances changent proportionnellement à l'ampleur de la lumière IR reçue.
Le système de détection infrarouge utilise cinq éléments essentiels : une source infrarouge, un support de transmission, un composant optique, des détecteurs infrarouges et un traitement du signal. La transmission infrarouge peut se faire à travers le vide, l’atmosphère et les fibres optiques. Pour en savoir plus sur le capteur IR, référez-vous à l'article sur le principe de fonctionnement des capteurs IR.
Pilote de moteur L298N
Le L298N est l’un des moyens les plus simples et les meilleurs de contrôler les moteurs à courant continu. Il s'agit d'un pilote de moteur à deux canaux qui peut contrôler la vitesse et le sens de rotation des moteurs à courant continu.
Ce pilote de moteur L298N est un module pilote de moteur haute puissance. Il est utilisé pour piloter des moteurs à courant continu et pas à pas. Ce pilote de moteur se compose d'un circuit intégré de pilote de moteur L298N et d'un régulateur de tension 78M05 5 V , de résistances, d'un condensateur, d'une LED d'alimentation et d'un cavalier 5 V dans un circuit intégré.

Lorsque le cavalier est placé, il active le régulateur de tension 78M05 . Lorsque l'alimentation est inférieure ou égale à 12 volts, le régulateur de tension alimentera les circuits internes. Lorsque l'alimentation électrique est supérieure à 12 volts, le cavalier ne doit pas être placé et doit fournir 5 volts séparés pour alimenter les circuits internes.
Ici, les broches ENA et ENB sont des broches de contrôle de vitesse pour le moteur A et le moteur B. IN1 et IN2 et IN3 et IN4 sont des broches de contrôle de direction pour le moteur A et le moteur B.
Moteurs BO
Un moteur BO est connu sous le nom de moteur fonctionnant sur batterie . Ces moteurs sont couramment utilisés dans les projets de loisirs où l'utilisateur a besoin d'un petit moteur à courant continu comme simple actionneur.

Les moteurs linéaires de la série BO fournissent un bon couple et un bon régime à des tensions de fonctionnement inférieures. Les moteurs BO sont disponibles en BO à engrenages en plastique à arbre unique, à double arbre et CC. Ces moteurs consomment un faible courant. Dans ce projet, nous avons utilisé quatre moteurs BO à arbre unique.
Batterie aux ions lithium
Une batterie lithium-ion est une batterie rechargeable. Il est couramment utilisé dans les appareils portables tels que les mobiles, les ordinateurs portables, les appareils électroniques et les véhicules électriques. Ils gagnent également en popularité pour les applications militaires et aérospatiales .
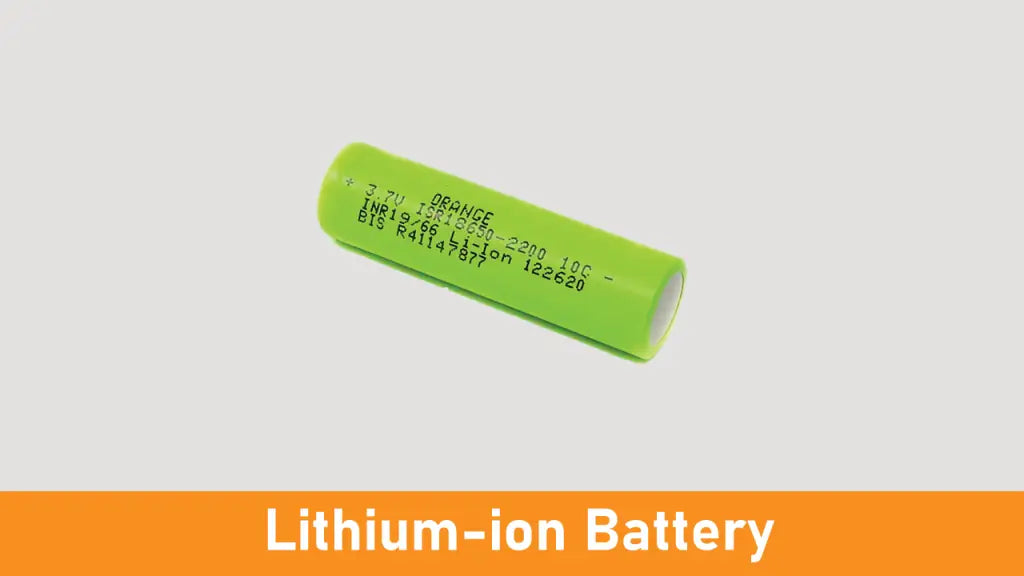
Une batterie lithium-ion fournit 3,7 V en mode stockage et 4,2 V en mode pleine charge. Dans ce projet, nous avons connecté deux batteries lithium-ion en série afin que la tension totale de la batterie soit de 8,4 V à pleine charge. Pour en savoir plus sur les batteries Lithium-ion, référez-vous à l'article sur le fonctionnement des batteries Lithium-ion.
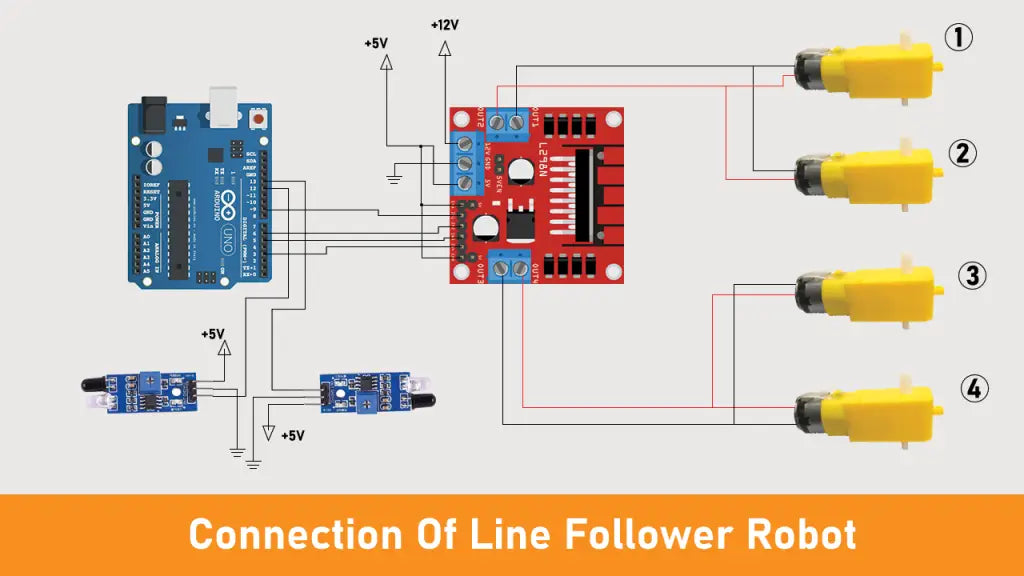
Schéma de connexion du robot suiveur de ligne
Ici, nous avons utilisé quatre moteurs BO . Les moteurs 1 et 2 sont connectés au premier canal du L298N, tandis que les moteurs 3 et 4 sont connectés au deuxième canal du pilote de moteur.
Les broches IN1, IN2, IN3 et IN4 sont connectées aux broches 9, 6, 5 et 3 de l'Arduino Uno. Ici, nous avons utilisé le cavalier entre +5V et les broches d'activation (EN1 et EN2). Vous pouvez le supprimer et établir la connexion externe, comme indiqué dans l'image ci-dessous.
Est ce que avec code ou non juste cablage
54144003
bonjour ; svp le code de ce projet
merci